Hello All!
It has been a while since my last post. I had a lot to do all these days so my spare time was really cut down. In this post i'm going to write a small how to on how to fix possible rotary encoder problems on your OWON SDS7102 Oscilloscope.
The issue:
Today while i was trying to read an analog signal using my OWON SDS7102 scope i realised that the Volts/div rotary encoder of Channel 1 didn't work as suspected. By turning the knob the value was jumping steps or do nothing ro changing direction. For example if channel 1 was set to 2V/div and the volts/div knob was turned one step right the value was jumping to 50V/div or to 20mv/Div or to another random value instead of 1V/div.
In an older post i was analysing how a rotary encoder works. Brinking that post to my mind i thought that may be there is a filtering issue and the mcu reads most of the noise coming out of the encoder as a real output.
As a hardware engineer i always like to tear down the devices and see what is really going on inside. So i did and i reached the keyboard pcb.
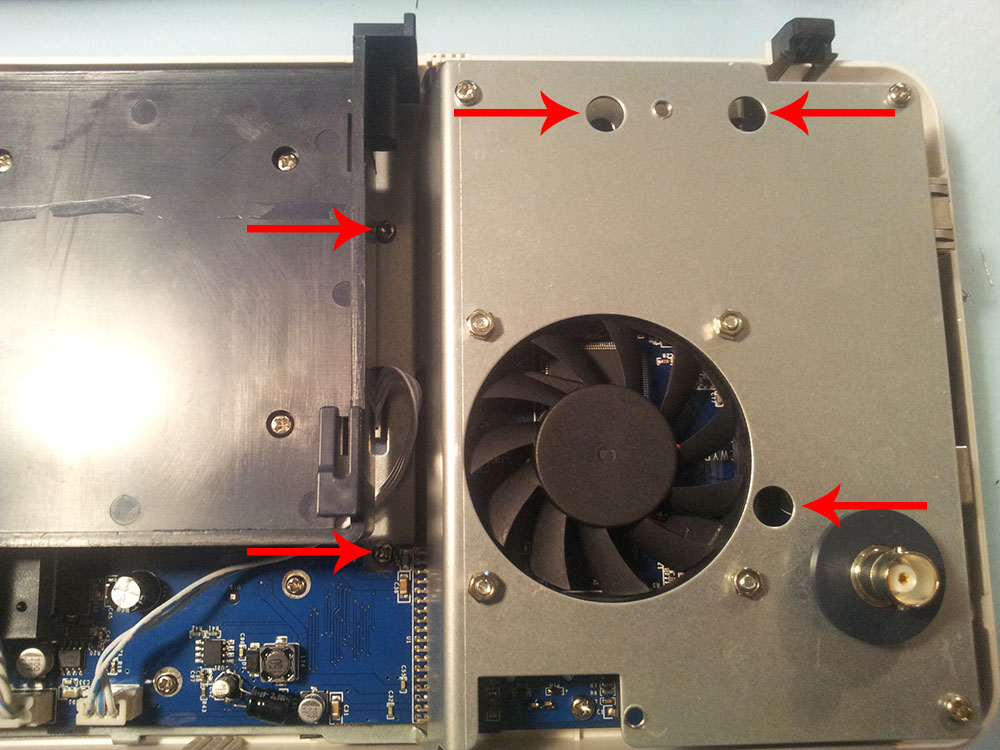
After removing the backside of the scope you only need to unscrew the 5 screws shown in the above photo in order to reach the keyboard.
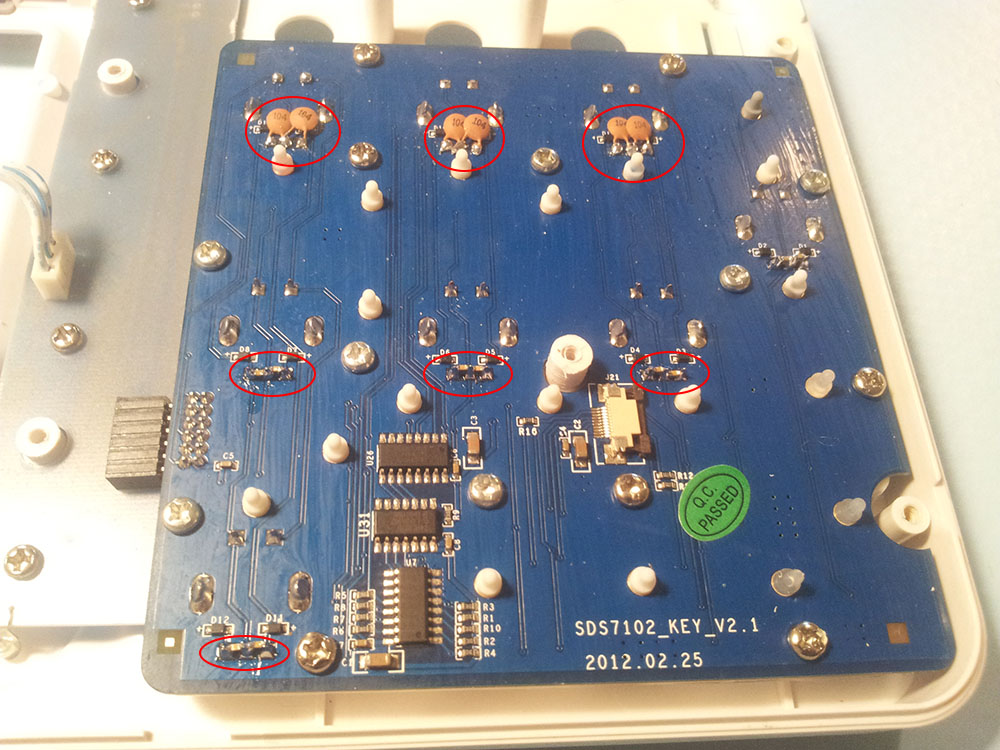
And… this is the keyboard back side. What i did was to solder two 100nF on each rotary encoder (one on each output) to filter the output signal. Each encoder has 3 pins in a row. The one in the middle is the GND and the other two on the sides are the outputs. As you can see in the above photo in the first raw i have soldered through hole capacitors and on the other two rows i have soldered SMD. Both types do the job and it's on your choice.
After the reassembly of the oscilloscope i made a test and i show fully improved behaviour of all the knobs. The capacitors solved the problem and increased the quality of the knobs.
The conclusion is that the Chinese manufacturer may had chosen to make a software filter instead of adding these capacitors to reduce the cost but the software finally wasn't that good to filter all the noise. By adding these capacitors we reduced the noise going to the mcu from the rotary outputs and make software filter life easier.
Now you can understand how important are the capacitors!
